

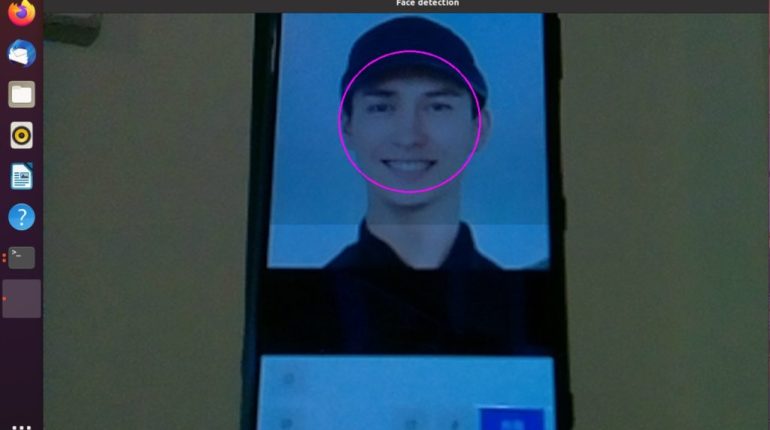
Raspberry Pi カメラモジュールで撮った画像をopencv_appsで顔認識してみる 前回までのところで、raspicam_node + opencv_appsをつかって画像処理をやってみた。今後、自作ロボット […]
Raspberry Pi カメラモジュールで撮った画像をopencv_appsで顔認識してみる 前回までのところで、raspicam_node + opencv_appsをつかって画像処理をやってみた。今後、自作ロボット […]
opencv_appsで顔認識してみようとしたらエラーが発生 opencv_appsの顔認識を使ってみようと思って、ラズパイのカメラを起動している状態でface_detection.launchを実行してみたところ [E […]
ROSを使ってみる ロボットをつくりたくなってきたのでROS(Robot Operating System)の勉強を始めました。内容があっちこっち飛びますが、基本的にはRaspberry Pi上でROSを動 […]
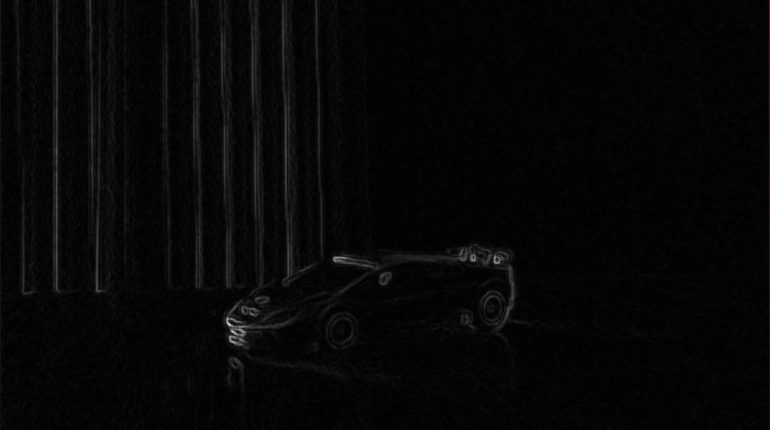
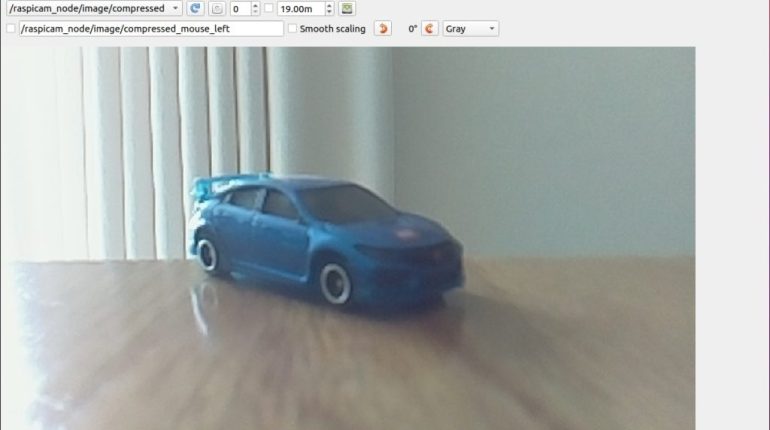
Raspberry Pi カメラモジュールで撮った画像をopencv_appsで画像処理してみる 前回までのところで、raspicam_nodeを使ってROSでRaspberry Piカメラモジュールのカメラで画像を取得 […]
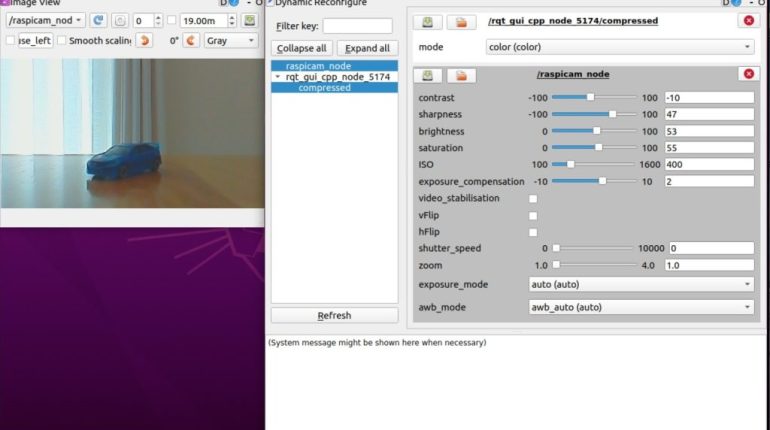
Raspberry Pi 4ロボットのカメラを調整してみる 前々回、raspicam_nodeを使ってROSでRaspberry Piカメラモジュールのカメラで画像が取得できるようになった。raspicam_nodeは、 […]
Raspberry Pi 4+ROSの起動処理をlaunchファイルにまとめてみる これまでROSをつかってラズパイでPS4コントローラとの接続&DCモータの制御、カメラモジュールとの接続などの処理を行ってきたが、ひとつ […]
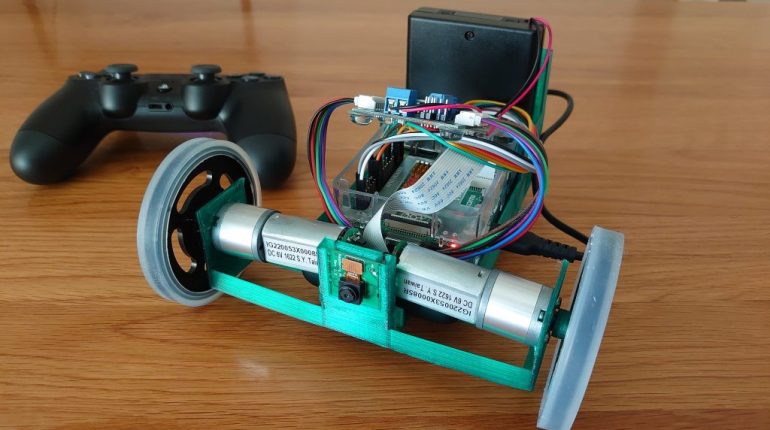
Raspberry Pi 4+ROSでRasberry Piカメラモジュールを使ってみる 前回でついに自作ロボットが動き出したのだが、現在ロボットの前面につけているラズパイのカメラモジュールは動かしておらず、ただの飾り状 […]
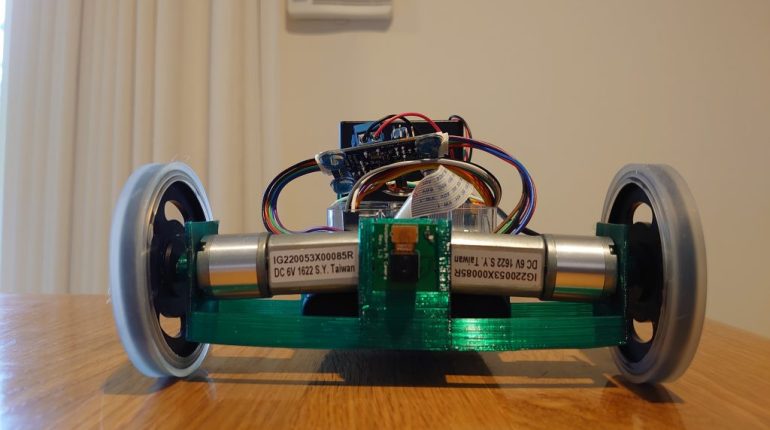
Raspberry Pi 4+ROSで自作ロボットを動かす 前回DCモータを回転させることができたので、今回はいよいよロボットとして動かしてみる。ロボットとして動かすなら部品を固定するフレームが必要だが、今回はフレームも […]
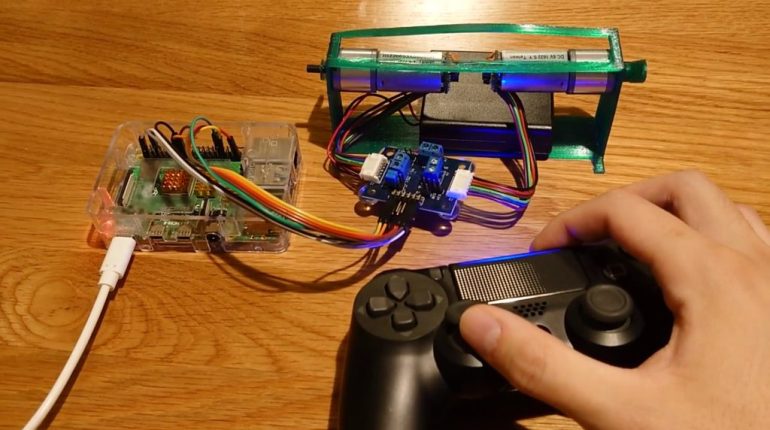
Raspberry Pi 4+ROSを使ってPS4コントローラーでDCモータをPWM制御する 前回はラズパイのGPIOピンにLEDを接続して、PS4コントローラーからGPIOを制御することでLチカをやってみた。今回はもう […]

Raspberry Pi 4+ROSを使ってPS4コントローラーでGPIOを制御する 前回はラズパイにROSをインストールして、PS4コントローラーを使うための環境をセットアップした。今回はラズパイのGPIOピンにLED […]