Raspberry Pi 4ロボットのカメラを調整してみる
前々回、raspicam_nodeを使ってROSでRaspberry Piカメラモジュールのカメラで画像が取得できるようになった。raspicam_nodeは、カメラの画像を確認しながらカメラの設定を調整できるdynamic reconfigure機能がついているということなので、今回はこの機能をつかってカメラの映像を調整してみる。
raspicam_nodeのインストール方法などは以下を参照。
https://wakky.tech/ros6-raspberry-pi-camera-module/
実行環境
Raspberry Pi 4 Model B / 4GB
Ubuntu Server 20.04.5 LTS(64-bit)
ROS Noetic Ninjemys
Raspberry Pi カメラモジュール Rev1.3
raspicam_nodeを起動する
まず、以前と同じ手順でraspicam_nodeを起動する。私はRev1.xのカメラを使っているので、ラズパイでターミナルを立ち上げて以下のlaunchファイルを実行。
roslaunch raspicam_node camerav1_1280x720.launch
キャプチャーが開始されたら、別のターミナルを起動し、
rqt_image_view
でimage Viewを立ち上げる。今回も青いミニカーを被写体にしている。
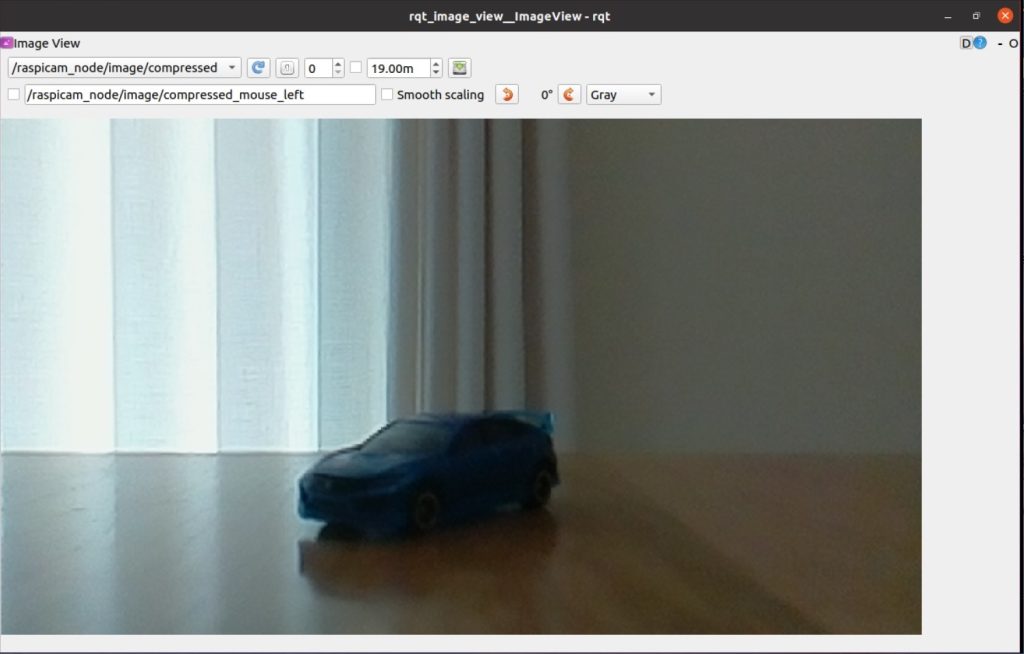
画像をみるとわかるように、全体的にかなり暗く、特にミニカーの手前側はほぼ見えない。今回はこれをもう少し見やすくしてみる。
dynamic reconfigureでカメラの画像を見ながらconfigurationする
カメラのcongifutrationを行うには、また新しいターミナルを立ち上げて以下を実行する。
rosrun rqt_reconfigure rqt_reconfigure
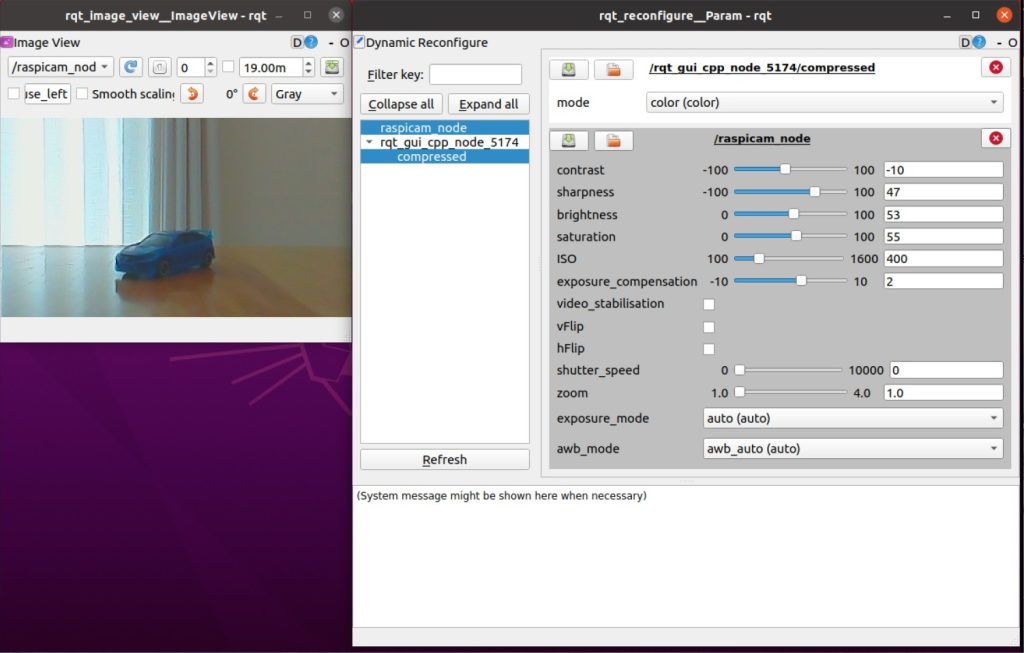
すると、GUI上で以下のようにconfiguration画面が立ち上がる。ここでconstrastやsharpnessなどの値を変えることで、リアルタイムにimageViewに表示されているカメラ画像に反映される。画像を見ながら調整できるので、画像の設定の調整がやりやすい。

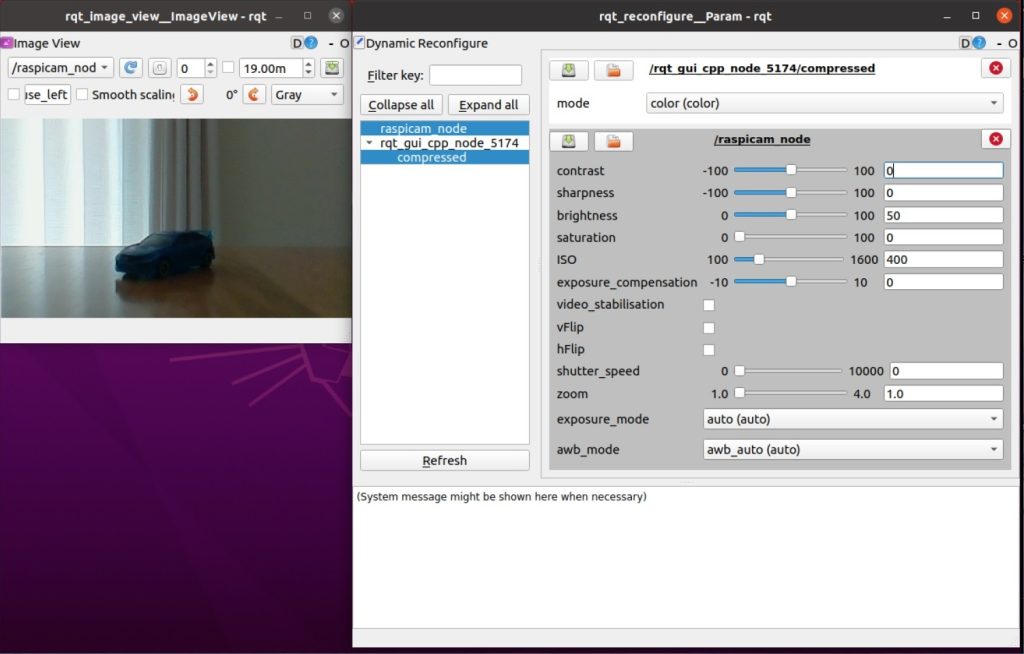
色々を試行錯誤を重ねて、最終的に以下のように設定をいじったら、かなりミニカーが見やすくなった。なお、今回は使用していないが、画像を垂直方向や水平方向に反転させたり、ズームして表示させることもできる。
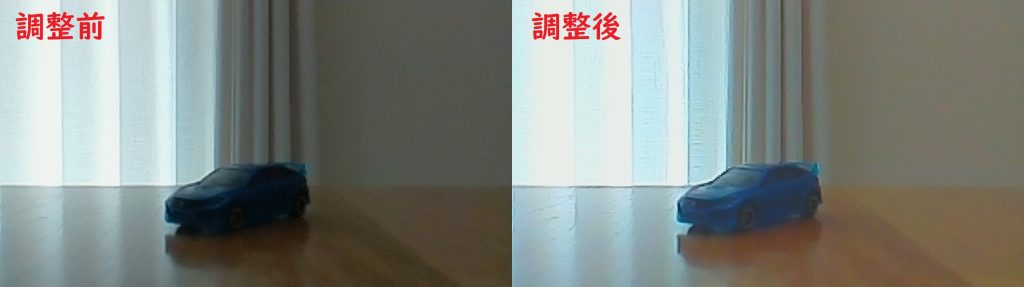
調整前の画像と調整後の画像を以下で比較してみた。調整後はミニカーの手前のタイヤなどが視認しやすくなっている。
次回もラズパイのカメラを使って遊んでいきたいと思う。
ROS勉強記まとめ
この勉強記は以下のページでまとめてます。