ROSを使ってみる
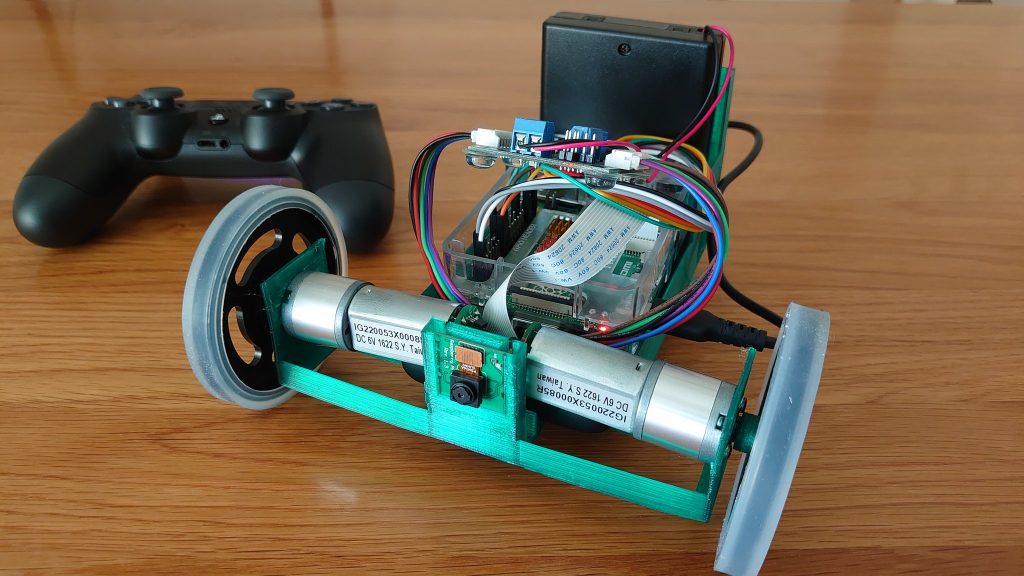
ロボットをつくりたくなってきたのでROS(Robot Operating System)の勉強を始めました。内容があっちこっち飛びますが、基本的にはRaspberry Pi上でROSを動かして、3Dプリンタで部品とかつくりつつ、オリジナルロボットを組み上げていく流れで進めてます。
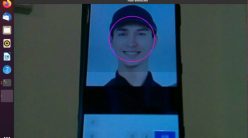
ROS勉強記その10:OpenCV(opencv_apps)を使って顔認識をやってみる
ROS勉強記その9:OpenCV(opencv-app)を使ってraspicam_nodeで撮影した画像を画像処理をする
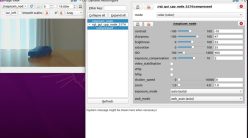
ROS勉強記その8:raspicam_nodeでカメラのconfigurationを調整してみる
ROS勉強記その7:Raspberry Pi ロボットの起動をlaunchファイルにまとめる
ROS勉強記その6:ROS(Noetic) でRaspberry Pi カメラモジュールv1.3を使う
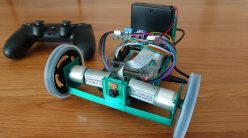
ROS勉強記その5:Raspberry Pi 4+ROS(Noetic) を使ってPS4コントローラーで自作2輪ロボットを動かす
ROS勉強記その4:Raspberry Pi 4+ROS(Noetic) を使ってPS4コントローラーの操作でDCモータを制御する
ROS勉強記その3:Raspberry Pi 4+ROS(Noetic) を使ってPS4コントローラーの操作でGPIOを制御してLチカ
ROS勉強記その2:Raspberry Pi 4にROS(Noetic) をインストール&PS4コントローラを接続する
ROS勉強記その1:WindowsにDockerをインストールしてROSをWebブラウザで動かしてみる